Շվեյցարացի ինժեներներն ստեղծել են առաջին թռչող ռոբոտը, որը կարող է թռչնի նման վայրէջք կատարել ճյուղի վրա
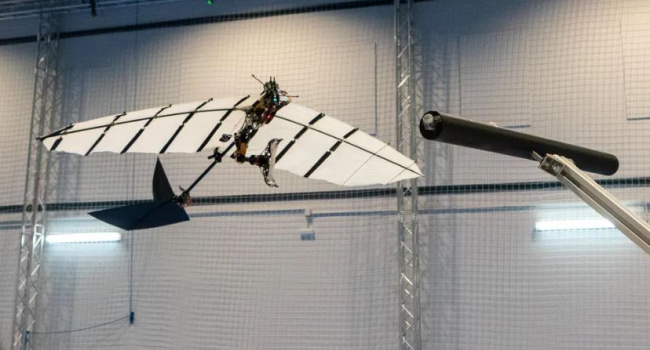
Լոզանի տեխնոլոգիական դաշնային ինստիտուտի ինժեներները Սևիլյայի համալսարանի հետ համատեղ ստեղծել են թևավոր ռոբոտ, որը կարող է վայրէջք կատարել նեղ հորիզոնական մակերեսի վրա՝ օգտագործելով ճանկերի նմանվող մեխանիզմ: Նորարարությունը կօգնի ընդլայնել ռոբոտների կողմից կատարվող առաջադրանքների շրջանակը։
Բնության մեջ ճյուղի վրա թռչունի վայրէջքի գործընթացը պահանջում է շատ ճշգրիտ հավասարակշռություն՝ հաշվի առնելով հարվածի ուժը, արագությունը և թռիչքի հետագիծը: Այս շարժումն այնքան բարդ է, որ ոչ մի թռչնաձիգ սարք (օրնիտոպտեր) դեռ չի կարողացել տիրապետել դրան:
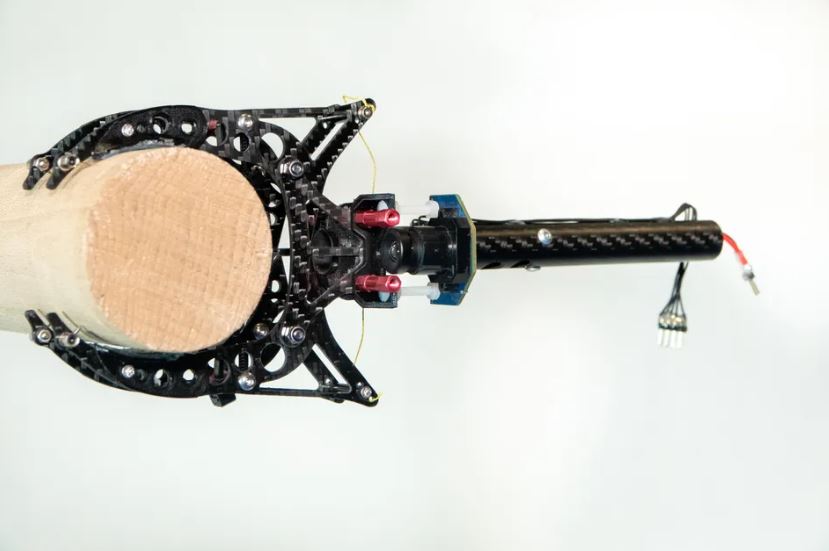
Այժմ հետազոտողները կարողացել են արդյունքի հասնել՝ 700 դրամ կշռող ռոբոտին զինելով նավիգացիոն համակարգով և հատուկ ճանկով, որը վայրէջքի ժամանակ կլանում է շարժման իներցիան և արագ բռնվում վայրէջքի համար նախատեսված մակերեսից, որպեսզի սարքը չընկնի։

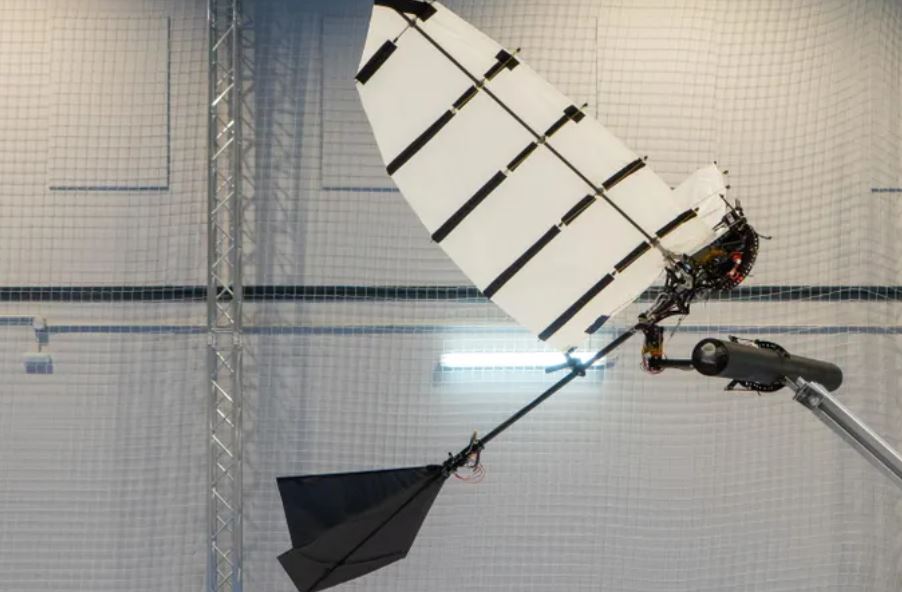
«Սա ավելի մեծ նախագծի մաս է կազմում։ Երբ թռնաձիգ սարքը սովորի ինքնուրույն վայրէջք կատարել ծառի ճյուղի վրա, նա կկարողանա կատարել որոշակի առաջադրանքներ, օրինակ՝ ծառից կենսաբանական նմուշներ կամ նյութեր հավաքել։ Ի վերջո, այն կարող է նույնիսկ վայրէջք կատարել արհեստական կառույցների վրա, ինչը կարող է հետագա կիրառման նոր ոլորտներ բացել»,- ասել է մշակման հեղինակներից Ռաֆայել Զուֆրին։
Նա նշել է, որ ճյուղի վրա վայրէջք կատարելու կարողությունն այս սարքի աշխատանքն ավելի արդյունավետ կդարձնի, քանի որ ինչպես մյուս անօդաչու թռչող սարքերը, դրա մարտկոցը նույնպես վերալիցքավորման կարիք ունի, իսկ ճյուղի վրա վայրէջք կատարելու կարողության շնորհիվ գուցե այն շատ հարմար լինի ավելի հեռու առաքելությունների համար, քանի որ ընթացքում կկարողանա վայրէջք կատարել վերալիցքավորման համար։
«Մանիպուլյացիոն առաջադրանքների և իրական աշխարհի այլ կիրառությունների համար սա մեծ քայլ է թևավոր ռոբոտների օգտագործման ուղղությամբ, որոնք այս պահից իսկապես կարող են դեռ միայն ազատ թռչել»,- հավելել է նա։
Ռաֆայել Զուֆրին պատմել է, որ իրենց պատրաստած թռչող սարքը միաժամանակ բազմաթիվ գործողություններ է կառավարում․ նախ այն պետք է կարողանա զգալիորեն դանդաղեցնել արագությունը վայրէջքի պահին և միաժամանակ շարունակի լինել թռիչքի մեջ։ Բացի դրանից, ճանկերը պետք է բավականաչափ ուժեղ լինեն, որպեսզի սարքը չընկնի: «Հենց այդ պատճառով է, որ մենք գնացինք մեկ ճանկ ունենալու ճանապարհով, այլ ոչ թե երկու»,- բացատրել է նա։
Ինժեները տեղեկացրել է, որ այս պահին թռիչքային փորձարկումներն իրականացվում են ներսում, քանի որ պետք է ունենալ վերահսկվող թռիչքային գոտի՝ շարժման ֆիքսման համակարգից ճշգրիտ տեղայնացմամբ։ «Ապագայում մենք կցանկանայինք մեծացնել ռոբոտի ինքնավարությունը՝ դրսի ավելի անկանխատեսելի միջավայրում վայրէջք կատարելու և մանիպուլյացիոն առաջադրանքներ կատարելու համար»,- հավելել է նա:
- Այս թեմայով
- Sparkles. Boston Dynamics-ը ներկայացրել է փափկամազ ռոբոտ շուն, որը կարող է պարել (տեսանյութ)
- Ներկայացվել է ռոբոտ, որն ուտեստ է պատրաստում, մատուցում, գինի լցնում, արդուկ անում, ծալում արդուկած շորերը
- Thermonator․ ԱՄՆ-ում սկսվել է շնանման հրանետ ռոբոտի վաճառքը․ ինչի՞ համար է այն կիրառվելու
- Boston Dynamics-ը ներկայացրել է Atlas ռոբոտի նոր տարբերակը, որն ամբողջովին էլեկտրական է․ որտե՞ղ է այն կիրառվելու
- Walker S մարդանման ռոբոտն ստացել է Baidu-ի ԱԲ-ը և սովորել է խոսել, տրամաբանել և կատարել հրամաններ
- Mercedes-Benz-ի գործարաններում մարդանման ռոբոտներ կհայտնվեն. ի՞նչ են նրանք անելու
- Ամենաընթերցվածը
ամիս
շաբաթ
օր
- WhatsApp-ը 2 նոր գործառույթ է ստացել 3513
- Ի՞նչ կլինի Երկրի հետ, եթե Լուսինն անհետանա 3100
- Ինչպե՞ս հասկանալ, որ ձեր սմարթֆոնը կոտրել են և հետևում են ձեզ 2600
- iPhone 16-ի հետևի վահանակը կարող է 7 գույնի փայլատ ապակի ստանալ 2533
- Ապրիլի 10 ամենահզոր Android սմարթֆոնները 2223
- Ներկայացվել է բացառիկ Redmi Note 13 Pro+ սմարթֆոն՝ նվիրված Մեսսիին և Արգենտինայի հավաքականին 1738
- ՌԴ-ում սմարթֆոնը բռնկվել է անմիջապես երեխայի ձեռքում 1698
- Instagram-ը փոխում է մոտեցումը. ինչպե՞ս այն կօգնի առաջխաղացնել բնօրինակ բովանդակությունը և պայքարել վերահրապարակողների դեմ 1572
- Արեգակի վրա հզոր բռնկում է տեղի ունեցել. ինչպե՞ս և ինչո՞ւ է այն հանգեցրել ռադիոկապի անջատման Խաղաղ օվկիանոսում 1552
- Արեգակնային համակարգում կա՞ Իններորդ մոլորակ. գիտնականները նոր ապացույցներ են գտել 1265
- Արխիվ