Swiss engineers create first flying robot capable of landing on branch like bird
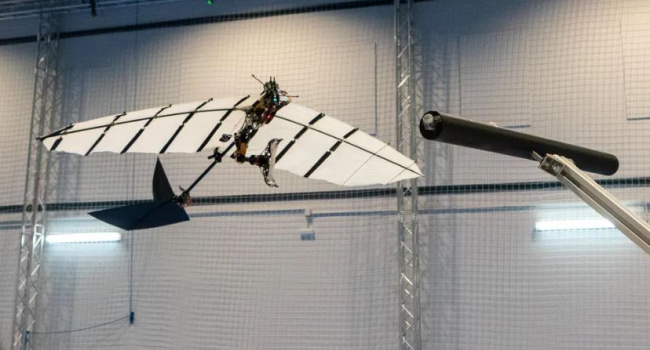
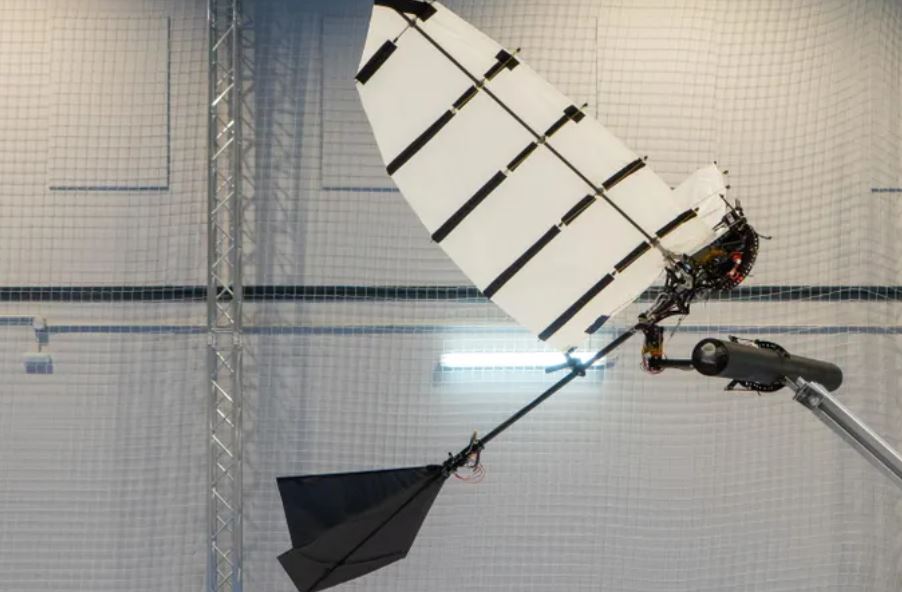
Engineers at the Federal Institute of Technology in Lausanne, in collaboration with the University of Seville, have created a winged robot that can land on a narrow horizontal surface using a claw-like mechanism. The innovation will help expand the range of tasks performed by robots.
In nature, the process of landing a bird on a branch requires a very precise balance with regard to impact force, speed, and flight path. This movement is so complex that no bird-flying machine (ornithopter) has yet been able to master it.
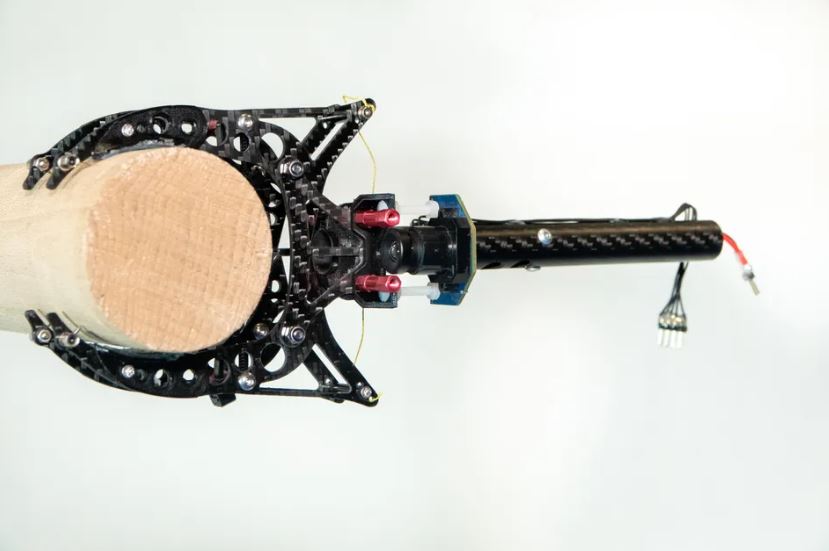
Now the researchers have succeeded by equipping the 700-dram robot with a navigation system and a special claw that absorbs the inertia of the motion when it lands and quickly grabs a surface designed for landing, so the device doesn't fall.

"This is the first phase of a larger project. Once an ornithopter can master landing autonomously on a tree branch, then it has the potential to carry out specific tasks, such as unobtrusively collecting biological samples or measurements from a tree. Eventually, it could even land on artificial structures, which could open up further areas of application," said Raphael Zufferey, one of the authors of the development.
He noted that the ability to land on a branch would make the device more efficient because, like other drones, its battery needs to be recharged, and the ability to land on a branch could make it more suitable for longer missions, during which it could land for refueling.
“This is a big step toward using flapping-wing robots, which as of now can really only do free flights, for manipulation tasks and other real-world applications,” he says.
Raphael Zufferey said the flying vehicle they created can perform many operations at once – first, it must be able to slow down significantly when landing and at the same time stay in flight. In addition, the claws must be strong enough to keep the device from falling. "That’s one reason we went with a single claw rather than two,” he explained.
The engineer said that, for now, flight tests are conducted indoors because of the need for a controlled flight zone with precise localization from the motion-capture system. "In the future, we would like to increase the robot’s autonomy to perform perching and manipulation tasks outdoors in a more unpredictable environment,” he added.
- Related News
- Sparkles: Boston Dynamics unveils a furry robot dog that can dance (video)
- Chinese startup introduces robot that prepares, serves, pours wine, irons, and folds ironed clothes
- Flame-throwing robotic dog unleashed for sale in US: What will it be used for?
- Boston Dynamics introduces new version of Atlas robot that is completely electric։ Where will it be applied?
- Walker S humanoid robot receives Baidu's AI and learns to speak, reason and follow commands
- Humanoid robots will appear at Mercedes-Benz factories: What will they do?
- Most read
month
week
day
- Xiaomi unveils exclusive Redmi Note 13 Pro+ dedicated to Messi and Argentina national team 1004
- Internet 500 times faster than 5G tested in Japan: It allows to transfer five movies in HD resolution in one second 845
- Which smartphones will be the first to receive Android 15? 753
- What will happen to the Earth if the Moon disappears? 748
- iPhone 16 may get colored matte glass back panel, 7 colors 723
- Great value for money: 3 best Realme smartphones 713
- WhatsApp receives two new features 681
- Why it is recommended to download applications on trusted platforms: In 2023, Google rejected publication of more than 2 million dangerous applications on Google Play 646
- Instagram is changing its approach to content recommendations: How will the application help promote original content and fight reposters? 609
- How to realize that your smartphone is hacked and you are being surveilled? 572
- Archive