Ստեղծվել է յուրահատուկ ռոբոտ, որը կարող է մագլցել․ ի՞նչ նպատակներով այն կարող է կիրառվել
ԱՄՆ-ի Քարնեգի Մելլոնի համալսարանի Ռոբոտային մեխանիկայի լաբորատորիայի հետազոտողները ներկայացրել են չորսոտանի ռոբոտ, որը կարողանում է մագլցել։ Ռոբոտն ստացել է LORIS անունը (Lightweight Observation Robot for Irregular Slopes):
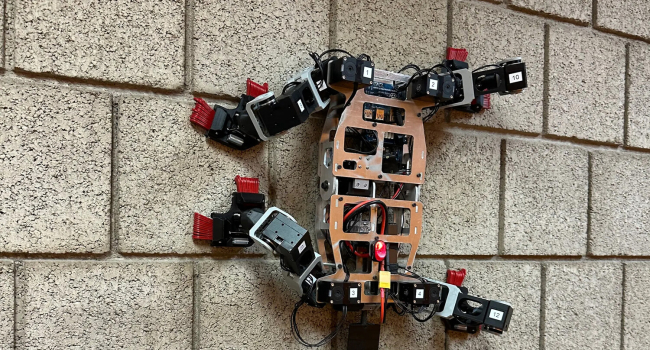
Ինչպես տեղեկացնում է New Atlas-ը, իր անալոգներից LORIS-ն առանձնանում է իր չորս ոտքերով, որոնք միկրոբռնակներ ունեն: Դրանք բաղկացած են բազմաթիվ փոքր, սուր կեռիկներից, որոնք մխրճվում են մակերևույթների փոքր իջվածքներում՝ թույլ տալով ռոբոտին հաջողությամբ տեղաշարժվել անհարթ մակերեսներով, ինչպիսիք են աղյուսը կամ քարե պատերը։ Սա այս ռոբոտին ավելի ունիվերսալ է դարձնում՝ ի տարբերություն այլ ռոբոտների, որոնք օգտագործում են վակուումային բռնիչներ, որոնք արդյունավետ են միայն հարթ մակերեսների վրա:
Ի տարբերություն այլ ռոբոտների, որոնք կիրառում է բռնման պասիվ մեթոդ, որի վրա ընկնում է սարքի ամբողջ քաշը, LORIS-ը կիրառում է մակերեսից բռնվելու ակտիվ մեթոդ, որն ուղեկցվում է էլեկտրական շարժիչների աշխատանքով: Սա նշանակում է, որ բռնիչի կեռիկներն ակտիվորեն մխրճվում են մակերեսի մեջ և ապահովում, որ ռոբոտն ապահով բռնվի ցանկացած ուղղությամբ: Այս մոտեցումը LORIS-ին թույլ է տալիս խոչընդոտները վերացնելու և հաղթահարելու տարբեր ռազմավարություններ իրականացնել։
Յուրաքանչյուր ռոբոտի ոտք ունի ճյուղավորված միկրոբռնիչ, որը բաղկացած է երկու խմբի բութակներց, որոնք գտնվում են միմյանց նկատմամբ ուղիղ անկյան տակ: Այս բռնիչները միացված են ոտքերին՝ դաստակի պասիվ միացությունների միջոցով, ինչը թույլ է տալիս նրանց ազատ լողալ օդում և ակտիվ արձագանքել ոտքերի շարժումներին: Այսպիսի կառուցվածքը նաև զգալիորեն նվազեցնում է ռոբոտի քաշը՝ բարձրացնելով դրա արդյունավետությունն ու մանևրելու ունակությունը։
LORIS-ը, ըստ մասնագետների, ռոբոտաշինության ոլորտում հեղափոխական գյուտ է՝ հնարավոր կիրառման լայն շրջանակով։ Այն կարող է օգտագործվել հետևյալ նպատակներով․
- Շինարարական աշխատանքների մշտադիտարկում,
- Որոնողափրկարարական աշխատանքների իրականացում,
- Դժվար հասանելի տարածքների հետազոտություն։
LORIS-ի զարգացումը նոր հորիզոններ է բացում բարդ և վտանգավոր առաջադրանքներ կատարելու համար ռոբոտների օգտագործման ոլորտում։
- Այս թեմայով
- Agility Robotics-ի մարդանման ռոբոտներն աշխատանքի կանցնեն GXO-ում
- Apple-ը որոշել է iPhone-ի հավաքման հոսքագծերի աշխատողների կեսին փոխարինել ռոբոտներով
- Ներկայացվել է ռոբոտ, որն ունակ է ճշգրիտ վերարտադրել մարդու շարժումները, այդ թվում՝ իրական ժամանակում
- Չեք հասցնի նույնիսկ թարթել․ Mitsubishi-ի ռոբոտը Ռուբիկի խորանարդը լուծելու արագության նոր ռեկորդ է սահմանել
- Ինչպե՞ս կարող են դրոններն օգնել բնական աղետների ժամանակ
- Unitree-ն ներկայացրել է իր մարդանման նոր ռոբոտը, որն ընկույզ է կոտրում, տոստ պատրաստում, անում ակրոբատիկ շարժումներ և արժե $16,000
- Ամենաընթերցվածը
ամիս
շաբաթ
օր
- WhatsApp-ը կդադարեցնի աջակցությունն ավելի քան 40 սմարթֆոնի համար․ որո՞նք են այդ մոդելները 4726
- Ի՞նչ անել, եթե սմարթֆոնը թրջվել է կամ ընկել ջուրը 2707
- Ինսայդերը շնորհանդեսից 2 շաբաթ առաջ Samsung Galaxy Watch 7-ի, Galaxy Watch Ultra-ի, Galaxy Buds 3-ի և Galaxy Buds 3 Pro-ի լուսանկարներ է հրապարակել 2135
- Արեգակի ակտիվ հատվածում հզոր բռնկում է տեղի ունեցել․ ինչպե՞ս է այն ազդել Երկրի վրա 1926
- Instagram-ի հայկական տիրույթում խաբեության նոր մեթոդ է տարածվում․ ինչպե՞ս խուսափել դրանից 1886
- OnePlus Pad Pro. աշխարհի առաջին Snapdragon 8 Gen 3 պլանշետն արժե ընդամենը 400 դոլար 1794
- Ինչո՞ւ հին iPhone-ները և Vision Pro-ն չեն ստանա ԱԲ աջակցություն․ Apple-ի պարզաբանումը 1748
- Բուլինգը հայաստանյան դպրոցներում. որքանո՞վ են ուսուցիչները տեղեկացված խնդիր մասին 1675
- Հայտնի է, թե երբ տեղի կունենա Made by Google միջոցառումը․ ի՞նչ է ներկայացվելու 1635
- WhatsApp-ն iPhone-ի համար նոր գործառույթ ունի 1580
- Արխիվ