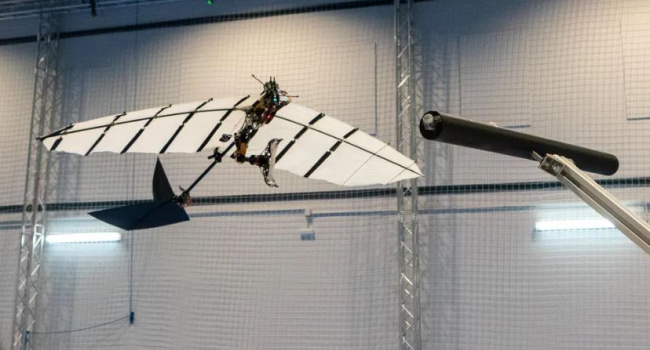
Швейцарские инженеры представили первого крылатого робота, который может как птица садиться на ветку
Инженеры Федерального технологического института в Лозанне в сотрудничестве со специалистами Университета Севильи разработали первого крылатого робота, который с помощью когтеобразного механизма может приземляться на узкую горизонтальную поверхность вроде ветки. Это изобретение поможет расширить круг задач, выполняемых роботами.
Чтобы приземлиться на ветку, птице требуется точный баланс, учитывающий силу удара, скорость и траекторию. На первый взгляд, движение может показаться довольно простым, но на самом деле оно настолько сложное, что до сих пор ни один летающий робот не мог его выполнить.
Лишь теперь инженерам удалось добиться результата: 700-граммового робота они оснастили навигационной системой и специальным механизмом, похобим на клешню, которая быстро хватается за поверхность, на которую садится робот, чтобы не дать ему упасть, а также поглощает инерцию движения при приземлении.

«Эта разработка – часть большого проекта. Как только робот научится самостоятельно приземляться на ветку дерева, он сможет выполнять определенные задачи, такие как сбор биологических образцов или материалов с дерева. Он может приземляться даже на искусственные сооружения, что может открыть новые области дальнейшего применения», — рассказал один из авторов разработки Рафаэль Цуфри.
По его словам, способность приземляться на ветку сделает это устройство более эффективным: любому летательному аппарату время от времени необходимо бывает перезаряжать аккумулятор; робот, способный приземляться на ветку и спокойно перезаряжаться, например, от солнечной энергии, может быть незаменим для длительных миссий.
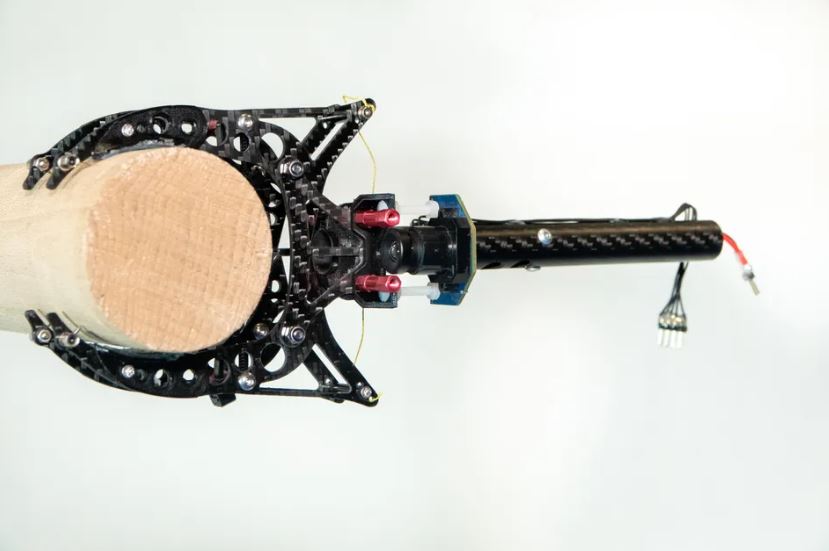
Созданный инженерами крылатый робот должен и может выполнять множество операций одновременно. Во-первых, он должен уметь значительно замедляться при посадке и в то же время оставаться в полете. Кроме того, его когти должны быть достаточно прочными, чтобы устройство удержалось на ветке или другой похожей поверхности и не упало.
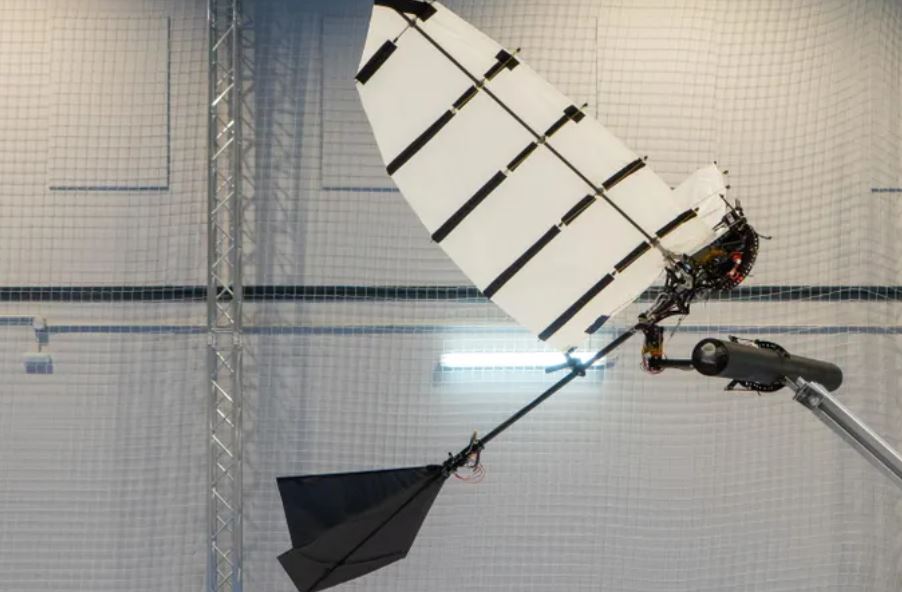
По словам инженера, на данный момент летные испытания проводятся только в помещении, так как необходимо наличие контролируемой зоны полета с точной локализацией места, куда робот должен будет сесть. Но в будущем специалисты рассчитывают увеличить автономность робота для выполнения задач по посадке в более непредсказуемых внешних условиях.
- Также по теме
- Sparkles: Boston Dynamics представила пушистого робота-пса, который может танцевать (видео)
- Представлен робот, который готовит, подает, разливает вино, гладит и складывает выглаженную одежду
- Thermonator: В США начались продажи мечущего пламя робота։ Для чего он будет использоваться?
- Boston Dynamics представила новую, полностью электрическую версию робота Atlas: Где он будет применяться?
- Робот-гуманоид Walker S получил ИИ Baidu и научился говорить, рассуждать и выполнять команды
- На заводах Mercedes-Benz появятся роботы-гуманоиды: Что они будут делать?
- Самые читаемые
месяц
неделя
день
- Мощная солнечная вспышка класса M9.5: Как и почему она привела к отключению радиосвязи в Тихом океане? 26074
- WhatsApp получил две новые функции 6160
- Какие смартфоны первыми получат Android 15? 4334
- Конец Земли! Когда и как будет уничтожена наша планета? (видео) 3524
- Что случится с Землей, если Луна исчезнет? 2379
- Колесо Смерти: Новый метод поможет астронавтам оставаться в форме в условиях низкой гравитации 1322
- Как понять, что ваш смартфон взломали и за вами следят? 1183
- В Японии испытали интернет в 500 раз быстрее 5G: Он позволяет передавать пять фильмов в HD-разрешении за одну секунду 1165
- Представлен эксклюзивный смартфон Redmi Note 13 Pro+, посвященный Месси и сборной Аргентины 1125
- Не переплачивать за производительность: Самые мощные среднебюджетные смартфоны апреля 1118
- Архив