Микроскопические роботы могут автономно передвигаться благодаря простому «мозгу»
Новые микророботы, созданные специалистами из Cornell University, оснащены элементарным «мозгом», благодаря которому они могут передвигаться автономно – в отличие от большинства других микроскопических роботов, нуждающихся в той или иной форме внешнего управления
Размеры новых микророботов достигают 100-250 микрометров в поперечнике: они примерно в 10 000 раз меньше, чем макророботы с встроенной CMOS-электроникой, и они могут двигаться со скоростью более 10 микрометров в секунду. Новые микророботы имеют разное количество «ног»:
- Двуногий «Перселл» был назван в честь физика Эдварда Перселла, который предложил столь же простую модель для объяснения плавательных движений микроорганизмов.
- Шестиногий «робот-муравей» ходит чередующейся треножной походкой, как у насекомого.
- Четвероногий «собакобот» может менять скорость, когда оператор посылает лазерные импульсы.
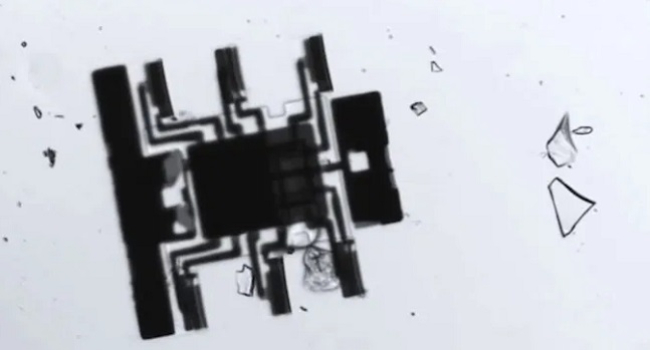
«Мозг» новых роботов представляет собой комплементарную структуру металл-оксид-полупроводник (CMOS), которая содержит тысячу транзисторов, массив диодов, резисторов и конденсаторов. Интегрированная структура CMOS генерирует сигнал, который создает серию прямоугольных волн со сдвигом по фазе, которые, в свою очередь, задают походку робота. Ноги робота – приводы на основе платины. И структура CMOS, и ноги питаются от фотогальваники. Исключительно низкое энергопотребление роботов избавило специалистов от необходимости использовать относительно большие фотогальваники.
Пока еще новые микророботы могут только «шагать» вперед, но в будущем они смогут играть серьезную роль в целом ряде сфер, например, в сфере здравоохранения: с их помощью можно будет проводить внутренние операции и очищать артерии. Что касается других возможных применений, они могли бы обнаруживать химические вещества и устранять загрязнения.
Конечно, до появления таких микророботов еще очень далеко, однако этот проект Cornell University показал, что технически они возможны.
- Также по теме
- Sparkles: Boston Dynamics представила пушистого робота-пса, который может танцевать (видео)
- Представлен робот, который готовит, подает, разливает вино, гладит и складывает выглаженную одежду
- Thermonator: В США начались продажи мечущего пламя робота։ Для чего он будет использоваться?
- Boston Dynamics представила новую, полностью электрическую версию робота Atlas: Где он будет применяться?
- Робот-гуманоид Walker S получил ИИ Baidu и научился говорить, рассуждать и выполнять команды
- На заводах Mercedes-Benz появятся роботы-гуманоиды: Что они будут делать?
- Самые читаемые
месяц
неделя
день
- Мощная солнечная вспышка класса M9.5: Как и почему она привела к отключению радиосвязи в Тихом океане? 26043
- 5 смартфонов Xiaomi, которые не стоит покупать 7651
- WhatsApp получил две новые функции 6145
- Какие смартфоны первыми получат Android 15? 4297
- Конец Земли! Когда и как будет уничтожена наша планета? (видео) 3499
- Что случится с Землей, если Луна исчезнет? 2366
- Колесо Смерти: Новый метод поможет астронавтам оставаться в форме в условиях низкой гравитации 1300
- Как понять, что ваш смартфон взломали и за вами следят? 1177
- В Японии испытали интернет в 500 раз быстрее 5G: Он позволяет передавать пять фильмов в HD-разрешении за одну секунду 1152
- Представлен эксклюзивный смартфон Redmi Note 13 Pro+, посвященный Месси и сборной Аргентины 1117
- Архив